160 Глава4. Организация шин
Иерархия шин
Если к шине подключено большое число устройств, ее пропускная способность падает, поскольку слишком частая передача прав управления шиной от одного устройства к другому приводит к ощутимым задержкам. По этой причине во многих ВМ предпочтение отдается использованию нескольких шин, образующих определенную иерархию. Сначала рассмотрим ВМ с одной шиной.
Вычислительная машина с одной шиной
В структурах взаимосвязей с одной шиной имеется одна системная шина, обеспечивающая обмен информацией между процессором и памятью, атакже между УВВ, с одной стороны, и процессором либо памятью — с другой (рис. 4.5).
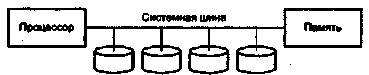
Устройства ввода/вывода Рис. 4.5. Структура взаимосвязей с одной шиной
Для такого подхода характерны простота и низкая стоимость. Однако одношин-ная организация не в состоянии обеспечить высокие интенсивность и скорость транзакций, причем «узким местом» становится именно шина.
Вычислительная машина с двумя видами шин
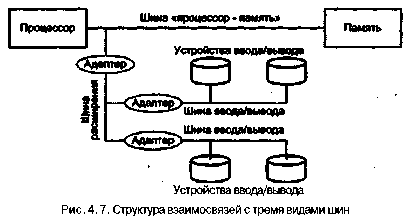
Хотя контроллеры устройств ввода/вывода (УВВ) могут быть' подсоединены непосредственно к системной шине, больший эффект достигается применением одной или нескольких шин ввода/вывода (рис. 4.6). УВВ подключаются к шинам ввода/вывода, которые берут на себя основной трафик, не связанный с выходом на процессор или память. Адаптеры шин обеспечивают буферизацию данных при их пересылке между системной шиной и контроллерами УВВ. Это позволяет ВМ поддерживать работу множества устройств ввода/вывода и одновременно «развязать» обмен информацией по тракту процессор-память и обмен информацией с УВВ.
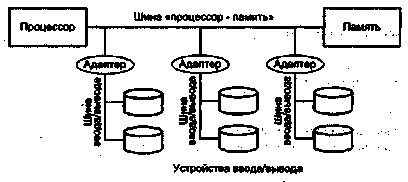
Рис. 4.6. Структура взаимосвязей с двумя видами шин