Протокол шины 181
гие — предварительно должны пройти через аппаратуру преобразования адресов процессора в адреса шины. Кроме того, отличия есть и в характеристиках отдельных сигнальных линий, драйверов и приемников. Рассмотренная ситуация, как уже отмечалось, называется перекосом сигналов. Прежде чем реагировать на поступивший адрес, все ведомые должны знать, с какого момента его можно считать достоверным.
Ситуация с передачей данных еще сложнее, так как данные могут пересылаться в обоих направлениях. В транзакции чтения имеет место задержка на время, пока ведомое устройство ищет затребованные данные, и ведомый должен каким-то образом известить о моменте, когда данные можно считать достоверными. Система должна предусматривать возможный перекос данных.
Метод, выбираемый проектировщиками шин для информирования о достоверности адреса, данных, управляющей информации и информации состояния, называется протоколом шины. Используются два основных класса протоколов — синхронный и асинхронный. В синхронном протоколе все сигналы -«привязаны» к импульсам единого генератора тактовых импульсов (ГТИ). В асинхронном протоколе для каждой группы линий шины формируется свой сигнал подтверждения достоверности. Хотя в каждом из протоколов можно найти как синхронные, так и асинхронные аспекты, различия все же весьма существенны.
Синхронный протокол
В синхронных шинах имеется центральный генератор тактовых импульсов (ГТИ), к импульсам которого «привязаны» все события на шине. Тактовые импульсы (ТИ) распространяются по специальной сигнальной линии и представляют собой регулярную последовательность чередующихся единиц и нулей. Один период такой последовательности называется тактовым периодом шины. Именно он определяет минимальный квант времени на шине (временной слот). Все подключенные к шине устройства могут считывать состояние тактовой линии, и все события на шине отсчитываются от начала тактового периода. Изменение управляющих сигналов на шине обычно совпадает с передним или задним фронтом тактового импульса, иными словами, момент смены состояния на синхронной шине известен заранее и определяется тактовыми импульсами.
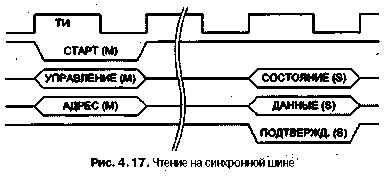
На рис. 4.17 показана транзакция чтения с использованием простого синхронного протокола шины NuBus, применяемой в персональных компьютерах Macintosh