Модель устройства управления 295
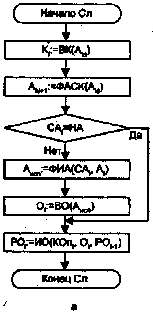
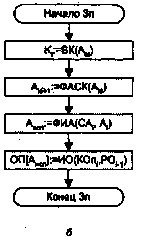
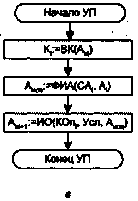
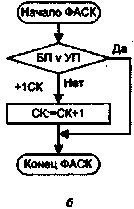
Рис. 6.1 .Типовые граф-схемы этапов исполнения команды: а — «Сложение»; б — «Запись»;
в— «Условный переход»
Оператор этапа исполнения операции для команд "Зп" имеет смысл записи результата предыдущей операции Р0М в ячейку с адресом Аисп:
0П[Аисл]:=ИО(КОП(,РОм).
Местоположение Р0М определяется кодом операции ΚΟη. Оператор этапа ИО для команд «УП» обеспечивает формирование адреса следующей (i + 1)-й команды в зависимости от Аисп и значения проверяемого условия перехода Уел
Местоположение проверяемого условия также определяется кодом операции КЩ
I
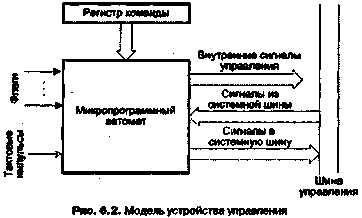
Модель устройства управления
Для выполнения своих функций УУ должно иметь входы, позволяющие определить состояние управляемой системы, и выходы, через которые реализуется управление поведением системы. Модель УУ показана на рис. 6.2 [200]. Входной информацией для устройства управления служат:
• тактовые импульсы — с каждым тактовым импульсом УУ инициирует выполне-
ние одной или нескольких микроопераций;
• код операции — код операции текущей команды поступает из регистра команды и используется, чтобы определить, какие микрооперации должны выполняться в течение машинного цикла;