3 0 0 Глава 6. Устройства управления
Микропрограммный автомат с жесткой логикой
Обычно тип микропрограммного автомата (МПА), формирующего сигналы управления, определяет название всего УУ. Так, УУ с жесткой логикой управления имеет в своем составе МПАс жесткой (аппаратной) логикой. При создании такого МПА выходные сигналы управления реализуются за счет однажды соединенных между собой логических схем.
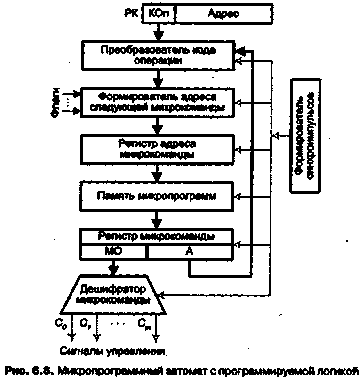
Типичная структура микропрограммного автомата с жесткой логикой управления показана на рис. 6.6.
Исходной информацией для УУ (см. рис. 6.2) служат: содержимое регистра команды, флаги, тактовые импульсы и сигналы, поступающие с шины управления.

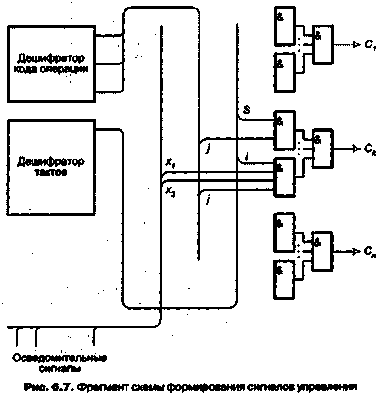
Код операции, хранящийся в РК, используется для определения того, какие СУ и в какой последовательности должны формироваться, при этом, с целью упрощения логики управления, желательно иметь в УУ отдельный логический сигнал для каждого кода операции (/„, /,,..., Ik). Это может быть реализовано с помощью дешифратора. Дешифратор кода операции преобразует код j-й операции, поступающей из регистра команды (РК), в единичный сигнал Haj-м выходе.
Машинный цикл выполнения любой команды состоит из нескольких тактов. Сигналы управления, по которым выполняется каждая микрооперация, должны вырабатываться в строго определенные моменты времени, поэтому все СУ «привязаны» к импульсам синхронизации (СИ), формируемым узлом синхроимпульсов. Период СИ должен быть достаточным для того, чтобы сигналы успели распространиться по трактам Данных и другим цепям. Каждый СУ ассоциируется с одним из тактовых периодов в рамках машинного цикла. Формирование сигналов, отмечающих начало очередного тактового периода, возлагается на синхрониза-