3 0 4 Глава 6. Устройства управления
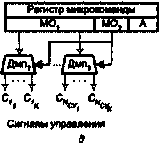
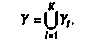
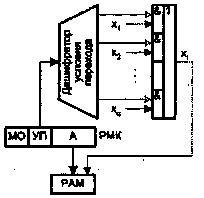
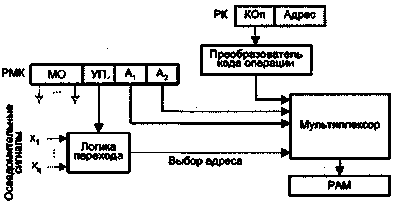
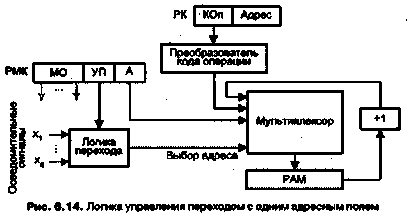
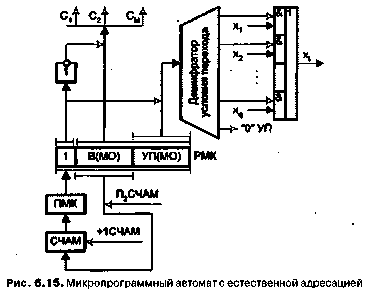
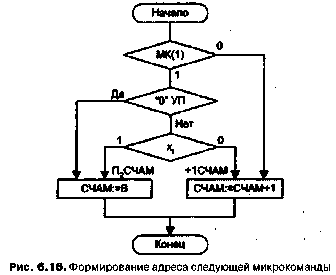
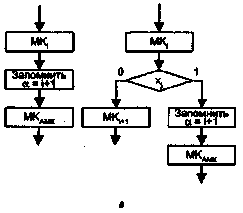
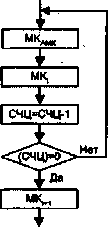
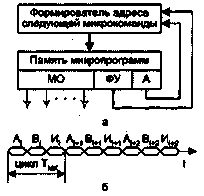
Запуск микропрограммы выполнения операции осуществляется путем передачи кода операции из РК на вход преобразователя, в котором код операции преобразуется в начальный (первый) адрес микропрограммы^. Этот адрес поступает через ФАСМ в регистр адреса микрокоманды. Выбранная по адресу Ап из ПМП микрокоманда заносится в РМК. Каждая микрокоманда в общем случае содержит микрооперационную (МО) и адресную (А) части. Микрооперационная часть микрокоманды поступает на дешифратор микрокоманды, на выходе которого образуются управляющие сигналы, инициирующие выполнение микроопераций в исполнительных устройствах и узлах ВМ. Адресная часть микрокоманды подается в ФАСМ, где формируется адрес следующей микрокоманды Аш.Этот адрес может зависеть от адреса на выходе преобразователя кода операции Ли, адресной части текущей микрокоманды А и значений осведомительных сигналов (флагов) X, поступающих от исполнительных устройств. Сформированный адрес микрокоманды снова записывается в РАМ, и процесс повторяется до окончания микропрограммы.
Разрядность адресной (#а)и микрооперационной (Ямо) частей микрокоманды определяются из соотношений
(6.1) 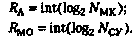 (6,2)
(6,2)
(6,2)где ΝΜΚ— общее количество микрокоманд; NCy— общее количество формируемых сигналов управления.
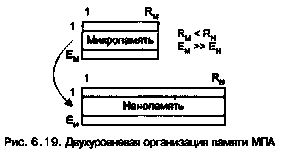
В свою очередь, необходимая емкость памяти микропрограмм равна

Кодирование микрокоманд
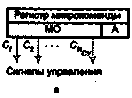
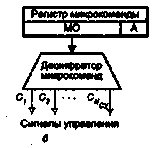
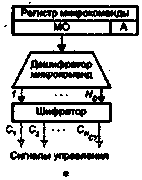
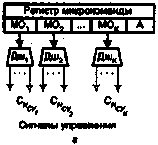
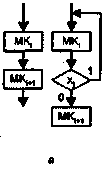
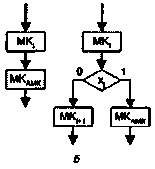
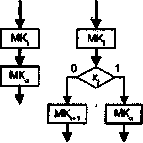
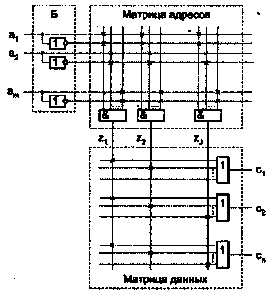
Информация о том, какие сигналы управления должны быть сформированы в процессе выполнения текущей МК, в закодированном виде содержится в микрооперационной части (МО) микрокоманды. Способ кодирования микроопераций во многом определяет сложность аппаратных средств устройства управления и его скоростные характеристики. Применяемые в микрокомандах варианты кодирования сигналов управления можно свести к трем группам: минимальное кодирование (горизонтальное микропрограммирование), максимальное кодирование (вертикальное микропрограммирование) и групповое кодирование (смешанное микропрограммирование). Структуры микропрограммных автоматов при различных способах кодирования микроопераций показаны на рис. 6.9 [12,28].
При горизонтальном микропрограммировании (см. рис. 6.9, а) под каждый сигнал управления в микрооперационной части микрокоманды выделен один разряд (#мо ~NCy)3ro позволяет в рамках одной микрокоманды формировать любые сочетания СУ, чем обеспечивается максимальный параллелизм выполнения микроопераций. Кроме того, отсутствует необходимость в декодировании МО и выходы регистра микрокоманды могут быть непосредственно подключены к соответствующим управляемым точкам ВМ. Широкому распространению горизонтального микропрограммирования тем не менее препятствуют большие затраты на хранение микрооперационных частей микрокоманд (ЕМ(у NMK * #су)причем эффек-